USD
Research URL
- USD-mainPage
- USD Basic terms
- USD-API
- Stage.h - class UsdStage / Layer.h - SdfLayer / Prim.h - class UsdPrim
- USD Survival Guide Github
- USD: Building Asset Pipelines
- USD-Based Pipeline (2016)
- Pixar BOF SIGGRAPH 2022
- NVIDIA Developer 가이드
- Houdini USD workflow
- Animal logic USD
- Dreamworks USD manager
- Dreamworks 80일간 USD 파이프라인 만들기 설계문서 (간략)
Term & Concepts
- Stage : this stands for high-level layer which contains other layers
- Layer : this is a layer which is made up for Stage
- Prim : the primary container object. this is comsist of Specifier (-> schema)
| Term | Definition | Why to use |
|---|---|---|
| Model Hierarchy | the hierarchy structure of USD | to manage a scene more efficiently |
| Kind | the feature that decide type and role of prim. There are five category - model - group - assembly - component - subcomponent |
to make usd readable and to check if the model hierarchy of usd is valid |
| Default prim | it stands for the prim which renderer need to look at. So, it show that which prim is the core prim or basic prim. | to make it easier for renderer to reference. and the rendere render a scene based on the default prims |
| LayerStack | The ordered set of layers. as first and strongest |
|
| Session Layer | the layer which is targeted to work on | |
| Namespace | this is equal to prim path (ex : /Root/Child/SubChild ) |
- Model Hierarchy
/World
├── /World/Character
│ ├── /World/Character/Body
│ └── /World/Character/Head
│ ├── /World/Character/Head/Eyes
│ └── /World/Character/Head/Mouth
└── /World/Environment
├── /World/Environment/Trees
└── /World/Environment/Sky
Cases
Create or Open stage
from pxr import Usd, UsdGeom
root_stage_usd_path = ".../asset.usd"
cur_stage = Usd.Stage.CreateNew(root_stage_usd_path)
cur_stage = Usd.Stage.Open(root_stage_usd_path)
Create (Define) or Search Prim
prim_path = "/root/child"
xform_prim = cur_stage.DefinePrim(prim_path , "xForm")
# using schema
xform_prim = UsdGeom.Xform.Define(stage, "/Root")
# Find prim
tar_prim = cur_stage.GetPrimAtPath(prim_path)
Get and Set Defualt prim
default_prim = stage.GetDefaultPrim()
stage.SetDefaultPrim(new_prim)
Override Prim
new_prim = stage.OverridePrim(f"/{new_default_prim_name}")
Save stage or root layer
# Save all layer under the current stage
stage.Save()
# Save only current root layer
stage.GetRootLayer().Save()
Reference a layer and check a list of references
from pxr import Usd
stage = Usd.Stage.Open("Stage_usd_file_path.usd")
root_prim = stage.GetPrimAtPath("/RootPrimName")
_usd_with_refs = "usd_filpath_referenced_in_the_stage.usd"
# Get a list of references and details of each reference
refs_metadata = root_prim.GetMetadata('references')
refs = refs_metadata.GetAddedOrExplicitItems()
for _ref in refs:
print(_ref.assetPath)
# Add a usd as reference
root_prim.GetReferences().AddReference(_usd_with_refs)
stage.GetRootLayer().Save()
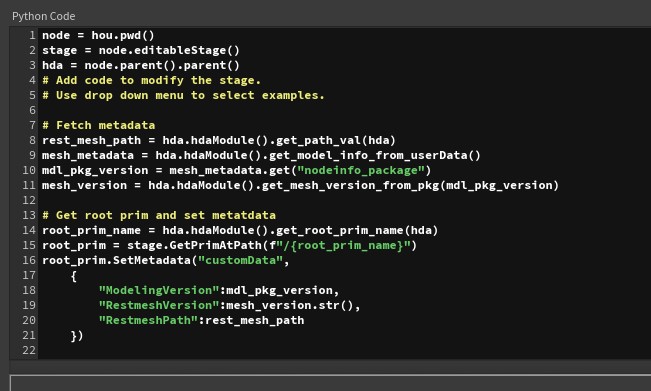
Save metadata in houdini’s lop network
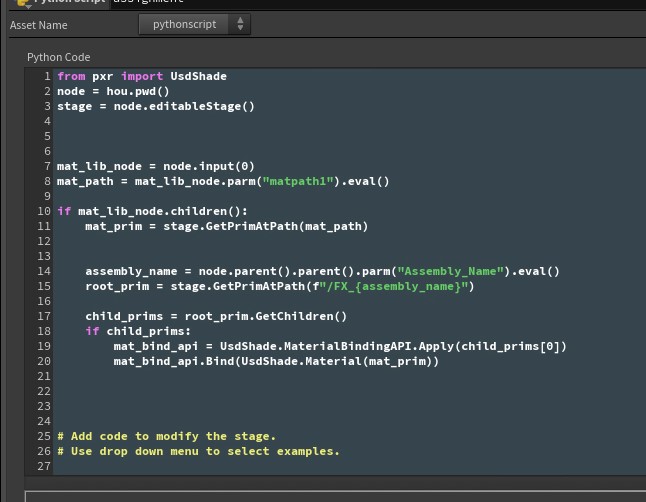
Bind material in houdini’s lop network
Author Kind & Bounding Box
- By authoring
kind, a prim can provide anextentsHintvalue which refer to bounding min/max box coordinates, in terms ofModel Hirarchy. Iterating whole hierarchy take too much cost - For more details,
extentis a concept which provide bounding box min/max coordinates.- To make each prim having the extent, each prim need to be inherited by
UsdGeomBoundableclass. - But, only leaf prim is inherited by the class, which means that xform or scope prim can’t have the extent value.
- But, if the prim has a
kind metadatawhich could be authored byUsdGeomModelAPI, UsdGeomModelAPI and kind can provideextentsHintwhich has a extent information. - Finally, viewport of DCC (Katana, Maya …) can render bounding box by referring to the extentsHint value
- How to set Kind
# root_prim_path : str
prim = stage.GetPrimAtPath(root_prim_path)
model_api = UsdGeom.ModelAPI.Apply(prim)
model_api.SetKind(Usd.Kind.Tokens.component)
Diary
Day 1 - build OpenUSD
- build Open USD using python
- clone OpenUSD git repo
- Open “x64 Native Tools Command Prompt”
- run command below
C:\> python OpenUSD\build_scripts\build_usd.py "C:\path\to\my_usd_install_dir"
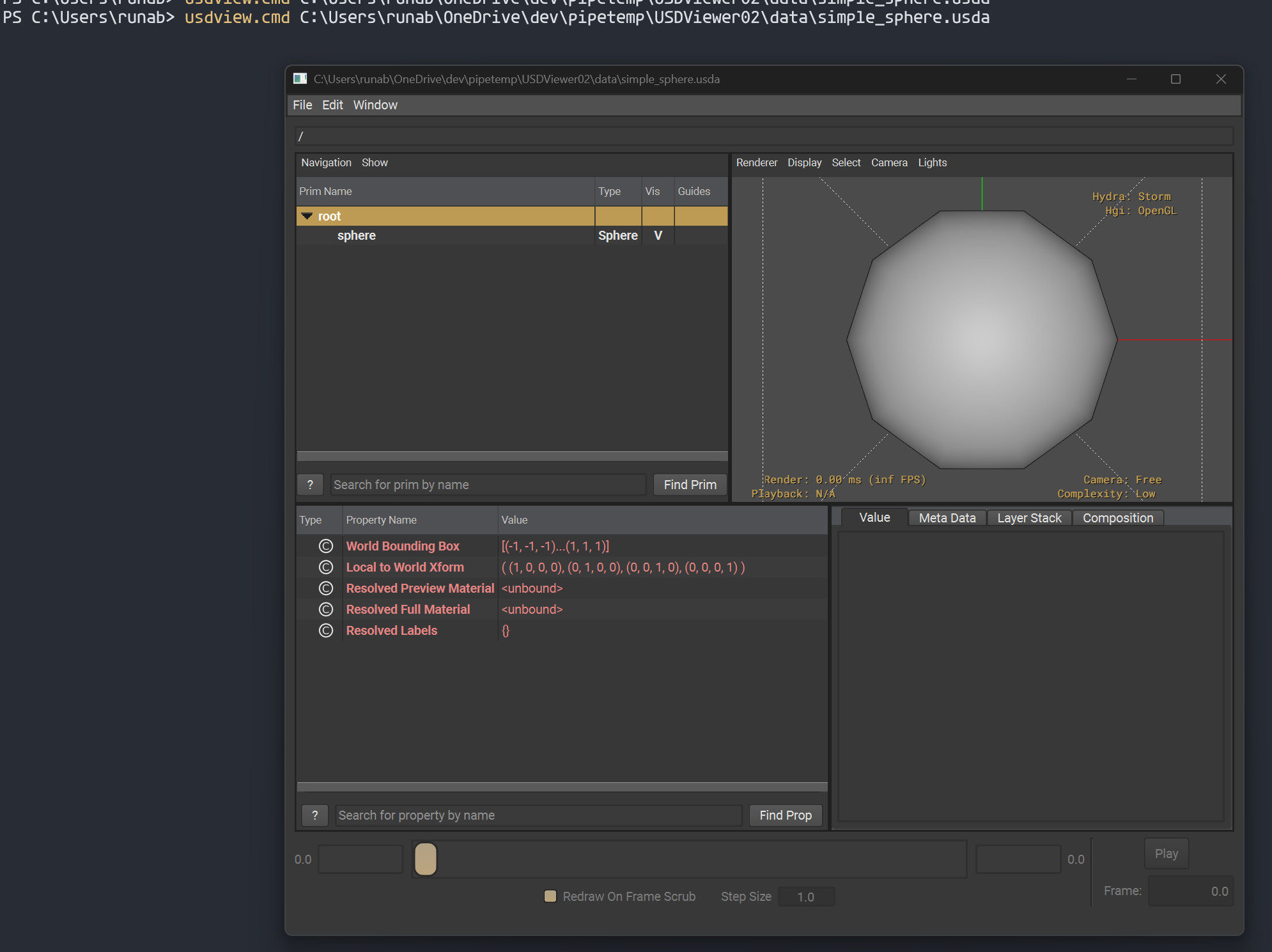
Day 2 - Simple Sphere and Errors as to usdview
- Do tests with simple CMakeLists.txt and cpp code
- Making a simple sphere
- Errors
- fail to build
OpenUSDbecause ofOneTbbistalled by vcpkg- I installed usd library using vcpkg, and it affect
build_usd.py
- I installed usd library using vcpkg, and it affect
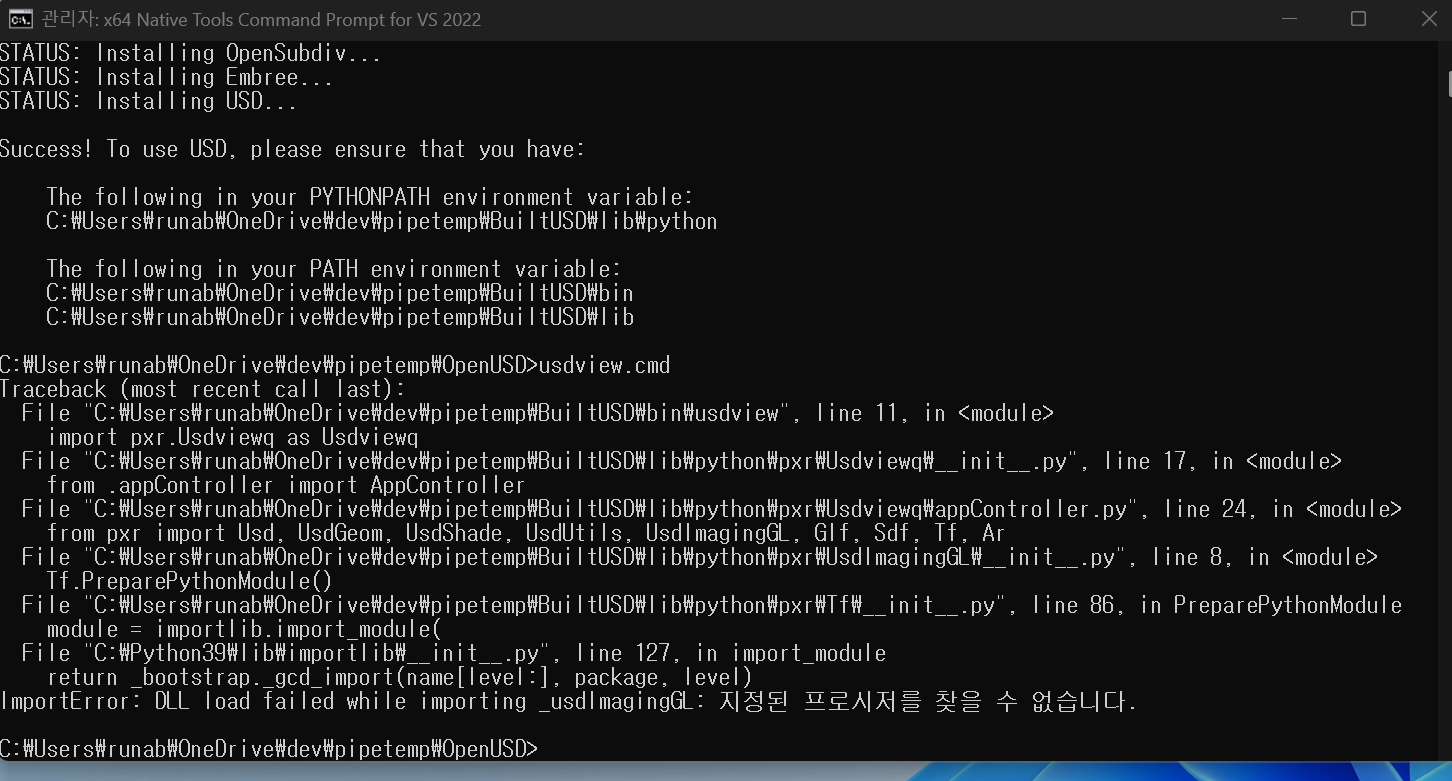
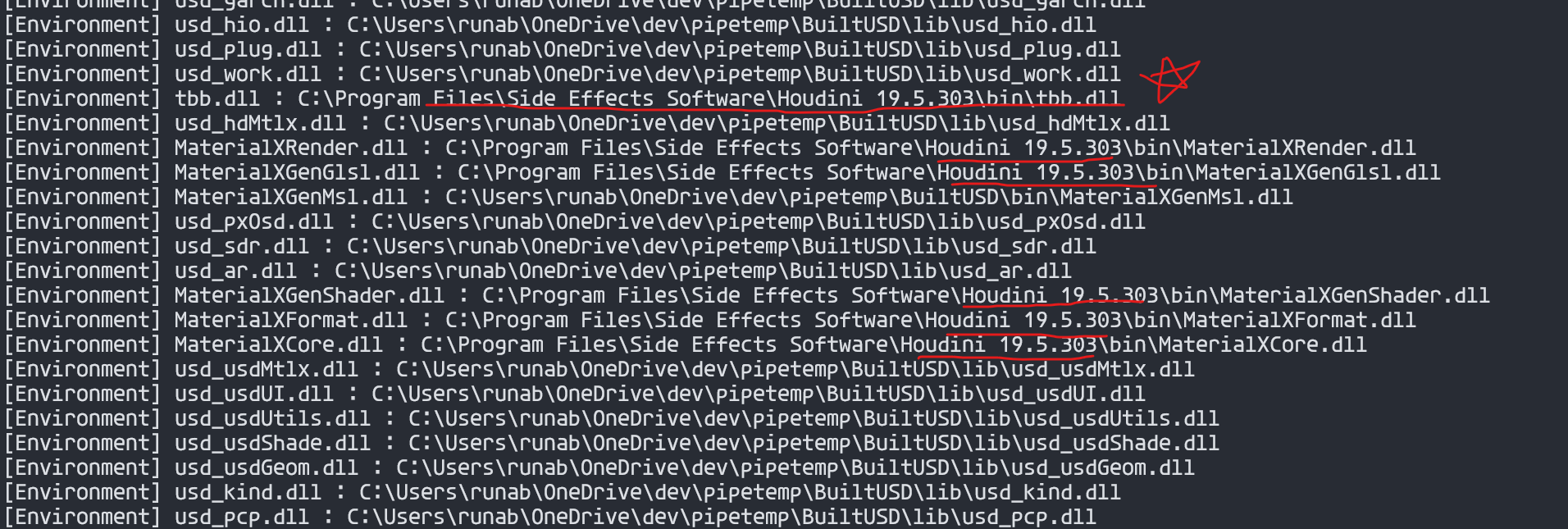
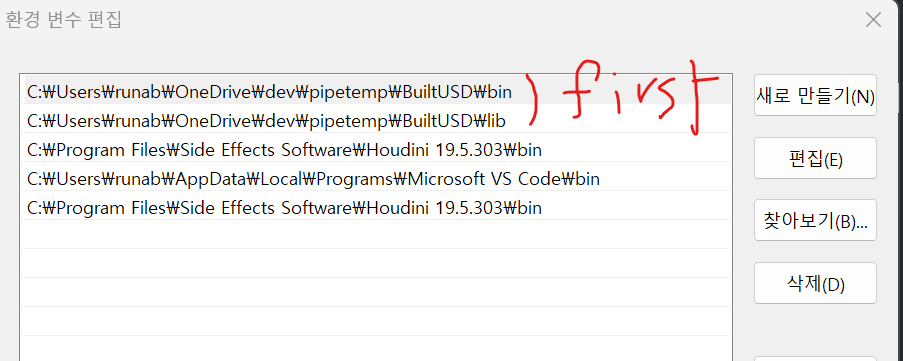
- fail to open
usdViewDependencies.exe -modules C:\Users\runab\OneDrive\dev\pipetemp\BuiltUSD\lib\python\pxr\UsdImagingGL\_usdImagingGL.pyd- this is because of houdini’s usd paths
- I removed the path, and then was able to open UsdView
- fail to build
-
CMakeLists.txt
cmake_minimum_required(VERSION 3.10) project(SimpleUSDSphere) # C++ 표준 설정 set(CMAKE_CXX_STANDARD 17) set(CMAKE_CXX_STANDARD_REQUIRED ON) add_compile_definitions(NOMINMAX WIN32_LEAN_AND_MEAN) # USD 라이브러리 경로 지정 (당신의 빌드된 USD 경로) # set(USD_ROOT "C:/Users/runab/OneDrive/dev/pipetemp/BuiltUSD") find_package(pxr REQUIRED) # pxr는 USD의 CMake 패키지 이름 message(STATUS "Imported targets from pxr: ${PXR_TARGETS}") message(STATUS "pxr library : ${PXR_LIBRARIES}") message(STATUS "pxr include : ${PXR_INCLUDE_DIRS}") # Python 찾기 (USD가 Python bindings를 요구하므로) find_package(Python3 REQUIRED COMPONENTS Interpreter Development) # Python 3.x 개발 헤더 포함 # 실행 파일 추가 add_executable(SimpleUSDSphere src/main.cpp) # USD 라이브러리 링크 (usd_ 스타일 사용) # PXR_TARGETS 를 보면 공백, 그 의미는 그냥 pxr 을 앞에 안 붙이고 바로 사용 target_link_libraries(SimpleUSDSphere PRIVATE usd usdGeom) # include 디렉토리 추가 (USD + Python) target_include_directories(SimpleUSDSphere PRIVATE ${PXR_INCLUDE_DIRS} ${Python3_INCLUDE_DIRS} # Python 헤더 (pyconfig.h 포함) ) -
powershell : .ps1
Remove-Item .\build\ -Recurse -Force -ErrorAction SilentlyContinue; New-Item -Path .\build -ItemType Directory | Out-Null; CMake -S . -B ./build -G "Visual Studio 17 2022" -DTBB_DIR=C:/Users/runab/OneDrive/dev/pipetemp/BuiltUSD/src/tbb/cmake -DOpenSubdiv_DIR=C:/Users/runab/OneDrive/dev/pipetemp/BuiltUSD/lib/cmake/OpenSubdiv -
c++ test code
#include <pxr/usd/usd/stage.h> // USD 스테이지를 위한 헤더 #include <pxr/usd/usdGeom/sphere.h> // Sphere 지오메트리를 위한 헤더 #include <pxr/usd/usdGeom/xformCommonAPI.h> // 위치/스케일 등의 변환을 위한 API #include <iostream> // 콘솔 출력용 int main() { // 새 USD 스테이지를 생성합니다. "simple_sphere.usda" 파일로 저장될 것입니다. std::cout << "Enter !!!! " << std::endl; pxr::UsdStageRefPtr stage = pxr::UsdStage::CreateNew("C:/Users/runab/OneDrive/dev/pipetemp/USDViewer02/data/simple_sphere.usda"); if (!stage) { std::cerr << "USD 스테이지를 생성할 수 없습니다." << std::endl; return 1; } // 루트 아래에 "/sphere" 경로로 새 prim을 정의합니다. pxr::UsdPrim spherePrim = stage->DefinePrim(pxr::SdfPath("/sphere"), pxr::TfToken("Sphere")); // UsdGeomSphere API를 사용해 sphere 속성을 설정합니다. pxr::UsdGeomSphere sphere(spherePrim); sphere.CreateRadiusAttr().Set(1.0); // 반지름을 1.0으로 설정 (기본 단위: 미터) // 위치를 설정합니다. (XformCommonAPI로 변환 적용) pxr::UsdGeomXformCommonAPI xformAPI(spherePrim); xformAPI.SetTranslate(pxr::GfVec3d(0.0, 0.0, 0.0)); // 위치: (0,0,0) xformAPI.SetScale(pxr::GfVec3f(1.0, 1.0, 1.0)); // 스케일: 기본 1배 // 스테이지를 파일로 저장합니다. stage->GetRootLayer()->Save(); std::cout << "USD 파일이 생성되었습니다: simple_sphere.usda" << std::endl; return 0; } - Complete to open simpletSphere.usda using usdview.cmd
Arnold Render Delegate Build
1. build enviroment
| OS : Rocky Linux | Maya and Arnold | Arnold SDK download |
|---|---|---|
 |
 |
 |
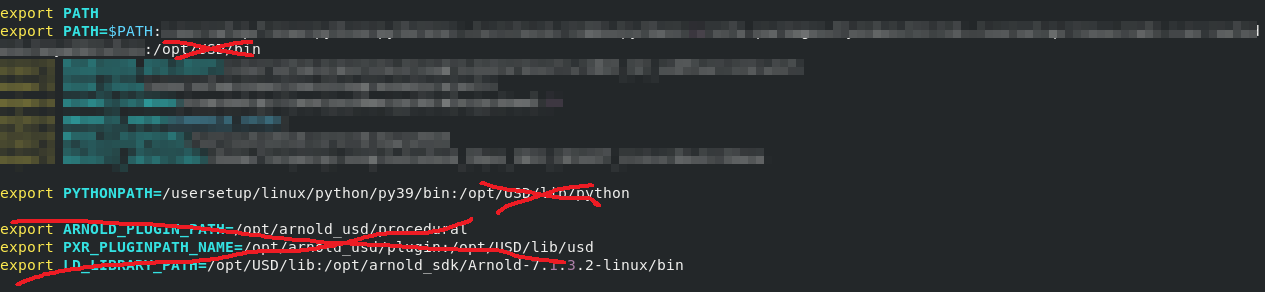
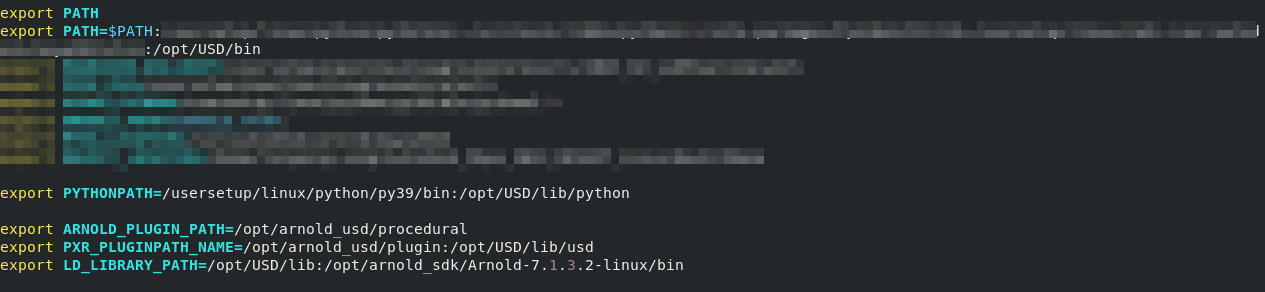
| bashrc before build | bashrc after build |
|---|---|
 |
 |
2. How to
- clone gits (OpenUSD / arnold-usd)
- download arnold sdk
- prepare python27 (not exists as default in rocky linux anymore)
- do install python devel for pyconfig.h error
dnf install python2-devel dnf install python3-devel - do build
[OpenUSD]v23.08 /usr/bin/python3.6 ./build_scripts/build_usd.py --force-all --build-shared --no-examples --no-docs --no-python-docs --ptex --openvdb --openimageio --opencolorio --alembic --hdf5 --materialx /opt/USD [arnold-usd]7.2.3.2 cmake -DCMAKE_BUILD_TYPE=Release -DARNOLD_LOCATION=/opt/arnold_sdk/Arnold-7.1.3.2-linux -DUSD_LOCATION=/opt/USD -DCMAKE_CXX_STANDARD=14 -DBUILD_DOCS=false -DCMAKE_INSTALL_PREFIX=/opt/arnold_usd
- caution
- Do not use python39 or other python verions with ‘dnf install python3.X’
- Use default python3.6 version
- Reason : There is a conflict between python paths
- use mayaUSD usdview to use
{mayapy_path} /usr/autodesk/mayausd/maya2023/{mayausd_version}/mayausd/USD/bin/usdview {usd file}
3. Render result
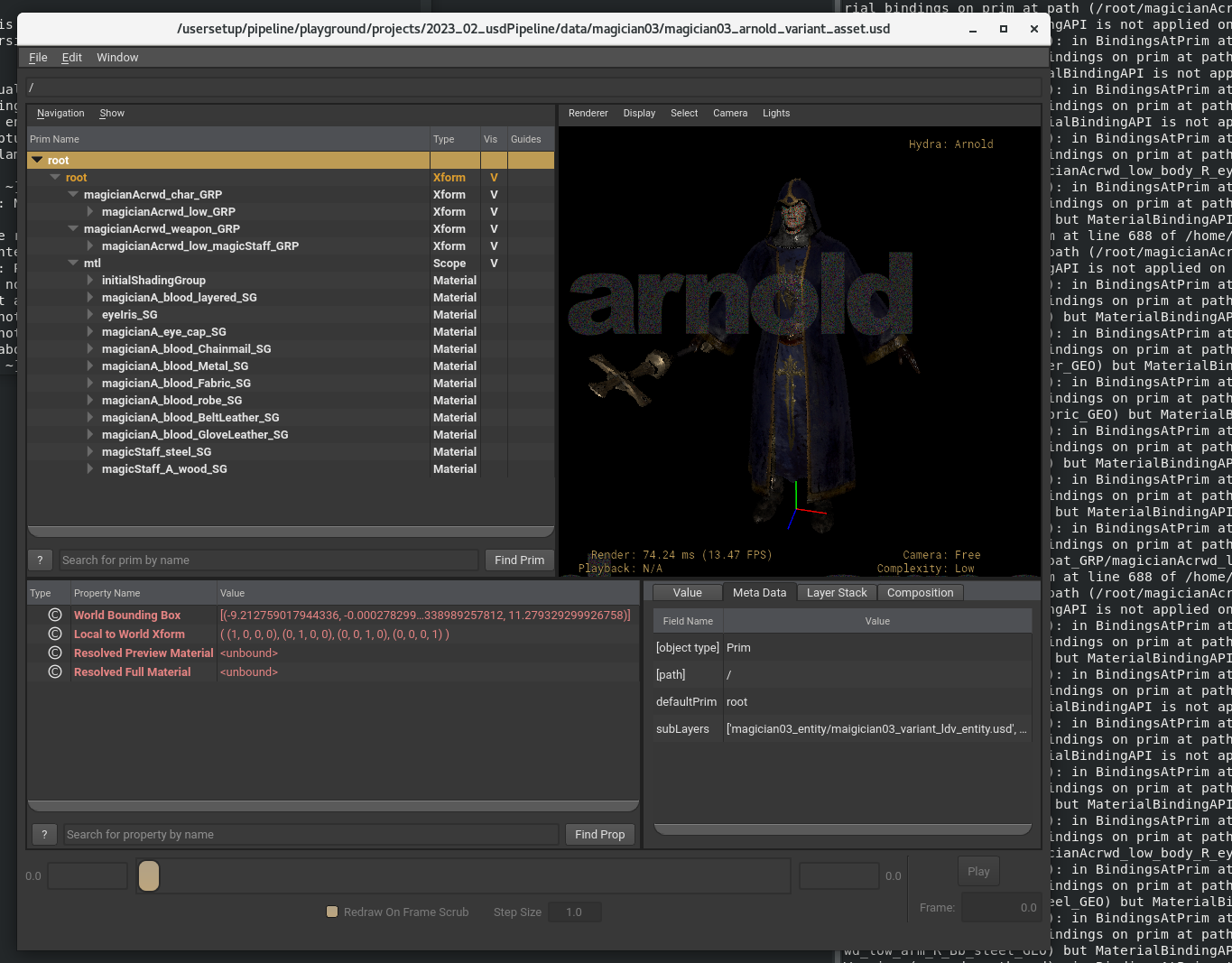
Warnning Message
1. Material Bind Error
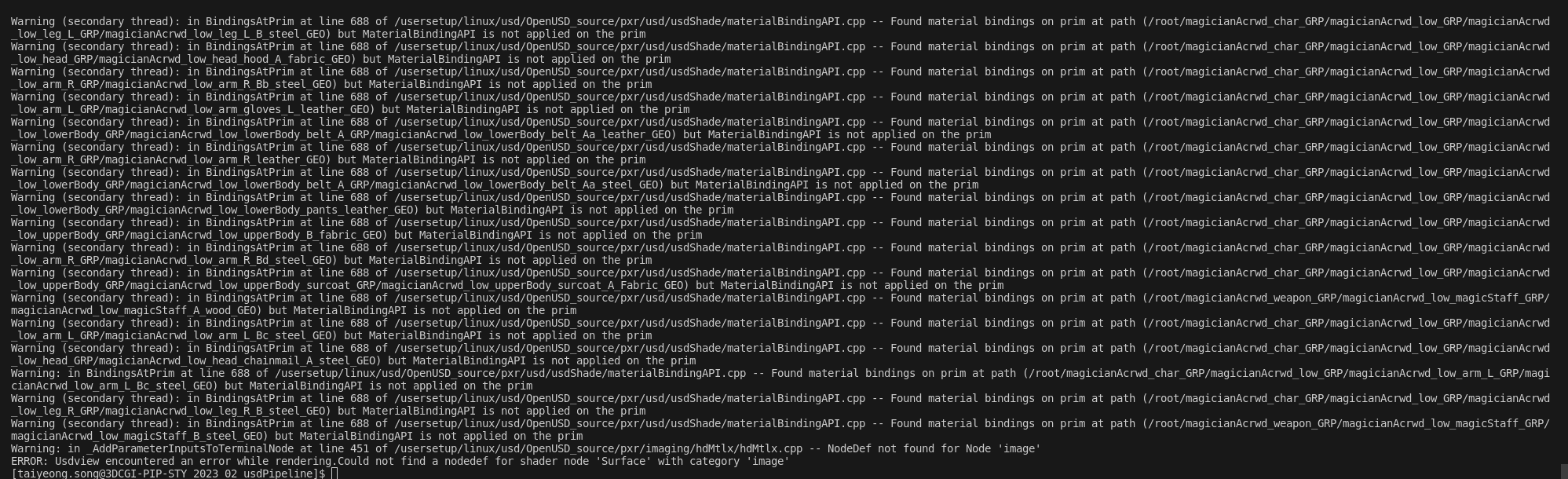
- how to solve ?
- check exported data in usdview –> there is no warnning message
- compare between exported data and written data which is made by code
- /usersetup/linux/usd/OpenUSD_source/pxr/usd/usdShade/materialBindingAPI.cpp –> cause : HasAPI
- find difference –> prepend apiSchemas = [“MaterialBindingAPI”]
- Do –> geo_prim.ApplyAPI(UsdShade.MaterialBindingAPI)
2. Unresolved Reference Path
Unresolved reference path </Geometry>
on prim @anon:000000005A89D200:LOP:rootlayer@,
@anon:000000005A89D000:LOP:rootlayer-session.usda@</asset>.
(recomposing stage on stage @anon:000000005A89D200:LOP:rootlayer@
<00000001BB883200>)
이 경고는 USD(Universal Scene Description)의 씬 구조에서 발생하는 경로 참조 문제를 나타냅니다. 경고를 해석하고 문제를 해결하려면 다음을 이해해야 합니다:
- 경고 원인
- Unresolved Reference Path:
- 경고는 경로
</Geometry>가 참조되었지만, 해당 경로에 실제로 존재하는 프림(prim)이 없음을 나타냅니다. - 참조 경로는 종종 다른 USD 파일의 내용을 로드하거나, 다른 레이어에서 데이터를 가져오는 데 사용됩니다. 경고는 특정 레이어 또는 파일에서
</Geometry>를 찾을 수 없음을 의미합니다.
- 경고는 경로
- Prim 정보:
- 경고에서
</asset>프림이 문제의 참조를 포함하고 있는 것으로 보입니다. - 이 프림이 USD 레이어에 정의된 참조(
references) 또는 인스턴싱(payloads) 중 하나에서 문제가 있을 수 있습니다. - it means that the assembly asset usd can not recognize the default prim of the referenced usd
- 경고에서
- Stage 구성:
- 경고는 해당 참조가
@anon:000000005A89D200:LOP:rootlayer@스테이지와 연결되어 있음을 나타냅니다. 익명의 스테이지나 세션 레이어(temporary, in-memory layers)에서 발생할 가능성이 높습니다.
- 경고는 해당 참조가
- Unresolved Reference Path:
-
해결 방법
- 참조 경로 확인
- USDView 또는 사용하는 DCC 툴(Houdini, Maya 등)의 Stage Viewer에서 해당 프림(
</asset>)을 선택합니다. references또는payloads속성을 확인하여 참조 경로가 올바르게 설정되었는지 점검하세요.<Geometry>프림이 로드되지 않았다면, 참조된 파일 경로나 경로 구성이 잘못되었을 가능성이 큽니다.
- USDView 또는 사용하는 DCC 툴(Houdini, Maya 등)의 Stage Viewer에서 해당 프림(
- 참조된 파일 확인
@anon:000000005A89D200:LOP:rootlayer@또는@anon:000000005A89D000:LOP:rootlayer-session.usda@에 정의된 내용을 확인하여</Geometry>프림이 존재하는지 확인하세요.- 만약 경로가 다른 USD 파일에 있는 데이터를 참조하려 한다면, 참조된 파일이 올바르게 로드되고 있는지 확인합니다.
- Check if the default prim is set correctly
- you need to check if the default prim is set correctly to the prim which exists in that usd file.
- 경로 수정
- 경로 문제를 수정하려면:
- 파일 경로가 절대 경로인지, 상대 경로인지 확인하고 올바른 경로로 업데이트합니다.
references를 사용하는 경우 정확한 파일 이름과 경로를 지정하세요.
- Example:
def "asset" { references = @path/to/geometry_file.usda@ }
- 경로 문제를 수정하려면:
- 참조 경로 확인